Real-time 3D Reconstruction for Autonomous Football Playing Robots Using a Feature Based Stereo Approach
This diploma thesis addresses the topics of stereo 3D reconstruction and shows the results of a feature based real-time stereo algorithm.
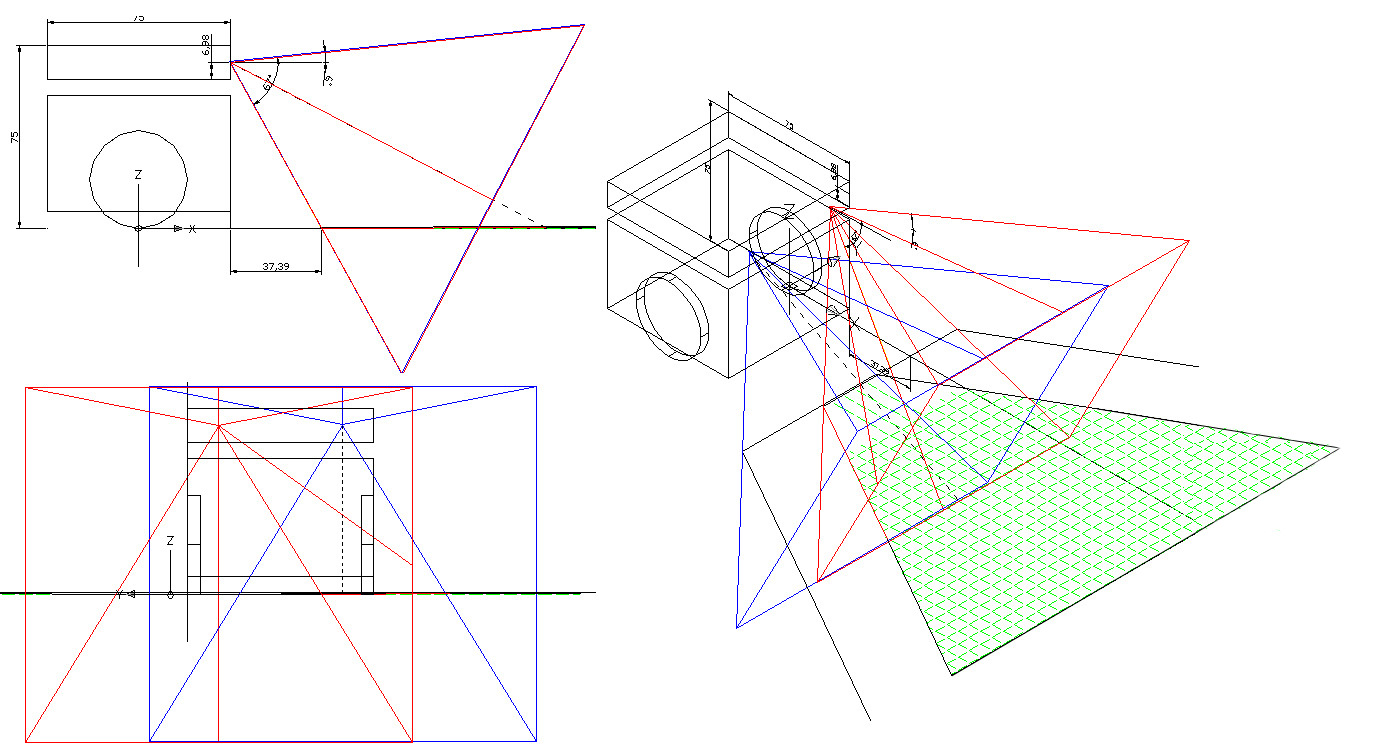
For understanding issues, it uses the pinhole camera to describe perspective projection. In reality, a lens is used to project the light rays onto the sensor chip, thus an extended model is presented in order to describe the projection using a lens and to introduce camera calibration.
In a dynamic environment stereo from motion is not possible, as a result a multi-camera system is needed. Epipolar geometry describes this special geometry and can be useful to minimize the computational cost of searching corresponding points in two images.
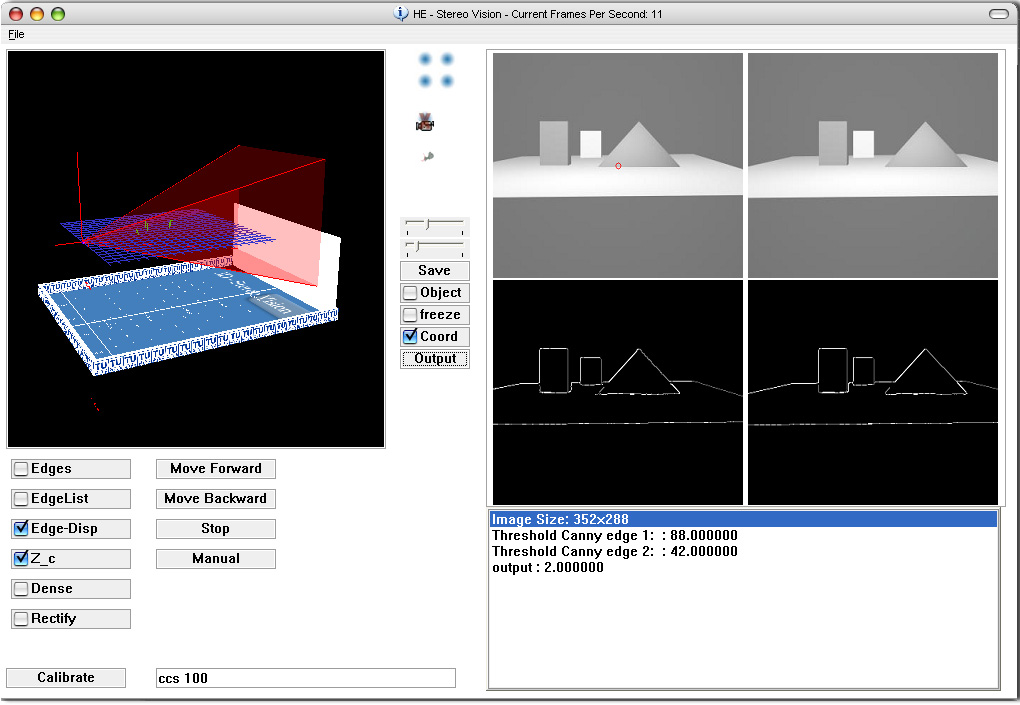
The feature extraction uses the Canny algorithm followed by a new iterative line detection. Straight lines are considered to be an appropriate representation of the football field and the robots.
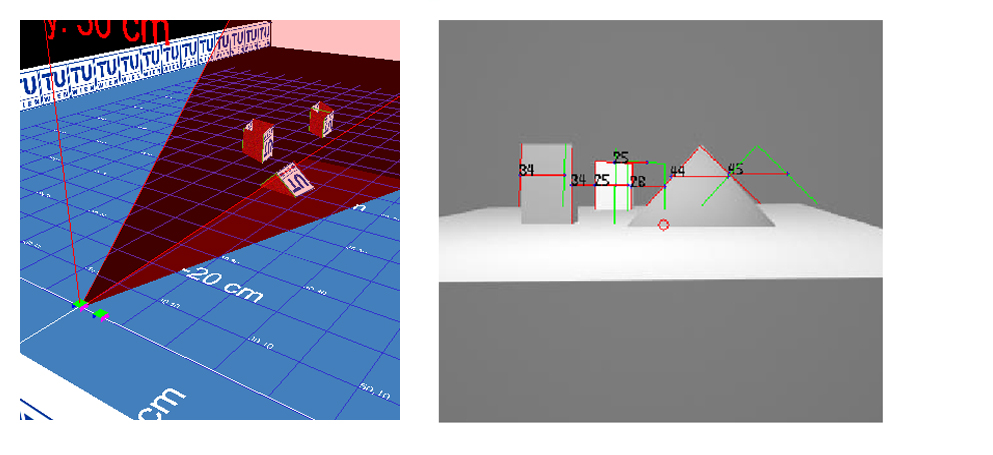
After features have been found the correspondences are searched and used to calculate the 3D position of the features.
Chapter 2 covers the theoretical background, whereas Chapter 3 describes the implemented methods.
In Chapter 4 every part of the algorithm is evaluated. It is followed by the conclusion and the future plans.