Next: Real data
Up: Correspondence Analysis
Previous: Correspondence Analysis
Synthetic data
The synthetic scenes are built using MAYA software. They contain the same objects as described in Section 4.2.2. The cameras have their origin in
![]()
![]() and heading in
and heading in ![]() direction. The focal length of the cameras is
direction. The focal length of the cameras is ![]() , the baseline is
, the baseline is ![]() . The aperture is given by
. The aperture is given by
![]()
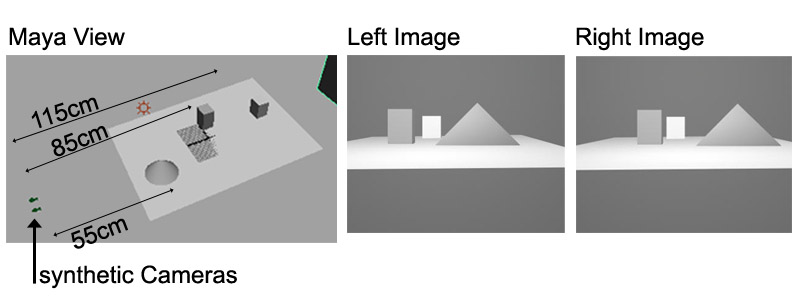
![]() . The aperture values have to be in inches4.3, no matter what global dimension is used. The cameras are totally parallel, thus no rectification is needed. The position of the objects in space is known and used to calculate the true disparities4.4. Figure 4.7 shows the synthetic left and right image. Also a perspective view of the maya environment is shown.
. The aperture values have to be in inches4.3, no matter what global dimension is used. The cameras are totally parallel, thus no rectification is needed. The position of the objects in space is known and used to calculate the true disparities4.4. Figure 4.7 shows the synthetic left and right image. Also a perspective view of the maya environment is shown.
 |
|
Table 4.4 shows the true disparities and the calculated ones. Actually the disparity is calculated using pixel accuracy, but it could be easily extended to subpixel accuracy. In this case not only one disparity per line would be calculated.
The maximum difference between the true and the calculated disparities is 1.7px. The mean disparity difference is 0.605 px, which is actually quite good for a pixel based disparity calculation. In cm it is a deviation of 1.421. The accurate disparities results due to the accurate attitude of the detected line. The next section evaluates the correspondence analysis using real data.
Next: Real data
Up: Correspondence Analysis