Next: Summary
Up: 3D Reconstruction
Previous: Synthetic data
Real data
To test the accuracy with real data the objects presented in Section 4.2.2 are used. Especially the reconstructed size and position of the objects is investigated. The objects are centered at the optical axis of the camera. Thus the position can be accurately estimated. A second technique would be to transform the coordinates to a world coordinate system and measure the difference in the world coordinate system. However, this is another possible source of error, thus the camera coordinate system is used.
The coordinates of the objects are shown in Table 4.7 and given in cm. The notation is the same as used in Table 4.6. Due to the noise in the images, the coordinates vary with +/- 1 pixel.
|
The maximum deviation of the ![]()
![]() and
and ![]() coordinates are 0.6cm and 5.4cm. The mean deviation of both coordinates is 0.2875cm and 3.025 which is accurate enough for autonomous football playing robots, only the
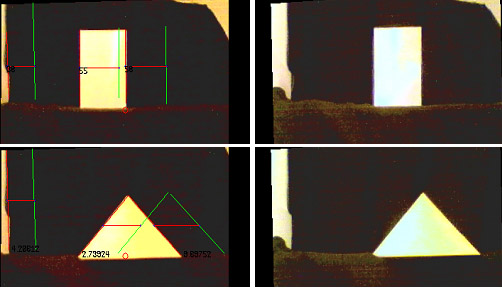
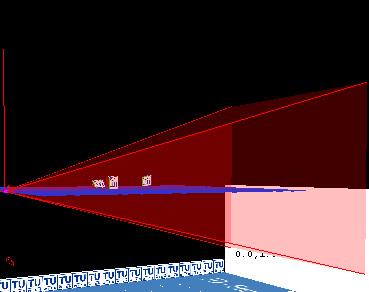
coordinates are 0.6cm and 5.4cm. The mean deviation of both coordinates is 0.2875cm and 3.025 which is accurate enough for autonomous football playing robots, only the ![]() coordinate is not that accurate. The maximum deviation is 3.6cm, which means that only 54.4% of the line are detected. The mean deviation is 1.7125cm. The error results of the line detection. Sometimes pixels of a line are marked as processed, if the line started before a corner and stops not exactly at the corner. It would be a further improvement to deal with this special case. The disparity, as before, a maximum error of 5px. Figure 4.10 shows the images of the cone and the cube used for the accuracy measurement. After the 3D reconstruction of the lines, the algorithm tries to detect objects, in other words lines that belong together. Figure 4.11 shows the result using the synthetic image shown in Figure 4.7.
coordinate is not that accurate. The maximum deviation is 3.6cm, which means that only 54.4% of the line are detected. The mean deviation is 1.7125cm. The error results of the line detection. Sometimes pixels of a line are marked as processed, if the line started before a corner and stops not exactly at the corner. It would be a further improvement to deal with this special case. The disparity, as before, a maximum error of 5px. Figure 4.10 shows the images of the cone and the cube used for the accuracy measurement. After the 3D reconstruction of the lines, the algorithm tries to detect objects, in other words lines that belong together. Figure 4.11 shows the result using the synthetic image shown in Figure 4.7.
To conclude, the reconstruction works accurate on synthetic data, but the quality significantly decreases in reality. Nevertheless the algorithm reaches 48 frames per second with an image of size 352px x 288px (Figure 4.7) on a Intel Celeron processor with 1.4 GHz. Unfortunately, the cameras are only able to transfer 30 frames per seconds which results in 15 frames per second, if real data is used.
Next: Summary
Up: 3D Reconstruction