Next: Robot Head
Up: Methods
Previous: Object detection
3D Reconstruction and Visualization
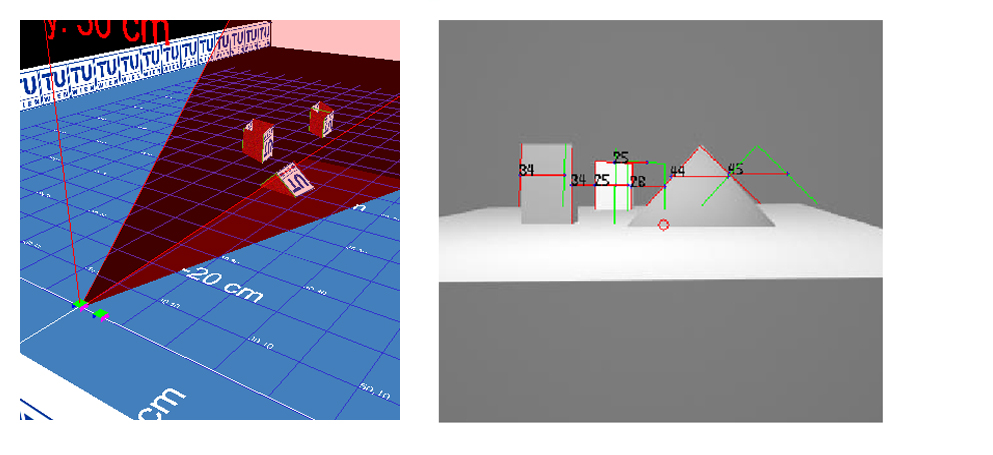
For each pair of corresponding lines, the 3D position can be computed. OpenGL has been used to visualize the result of the reconstruction. The origin of the left camera is positioned at the origin of the OpenGL coordinate system, but can be moved along the y axis if desired. A 10cm x 10cm grid can be displayed to have an idea where the objects are placed in reference to the real world. Also the view of the camera can be displayed. Figure 3.13 shows the result of the reconstruction using a synthetic image pair. The coordinate system is off.
If the right mouse is clicked inside the application, the program switches to the 3D window. It is now possible to fly around in the reconstructed world. The commands are given by
- w
- move forward
- a
- strafe left
- d
- strafe right
- s
- move backward
The mouse can be used to change the viewing direction. Figure 3.14 shows an image of the whole application. The view of the camera is displayed, as well as the coordinate system that is 50cm translated in y direction.
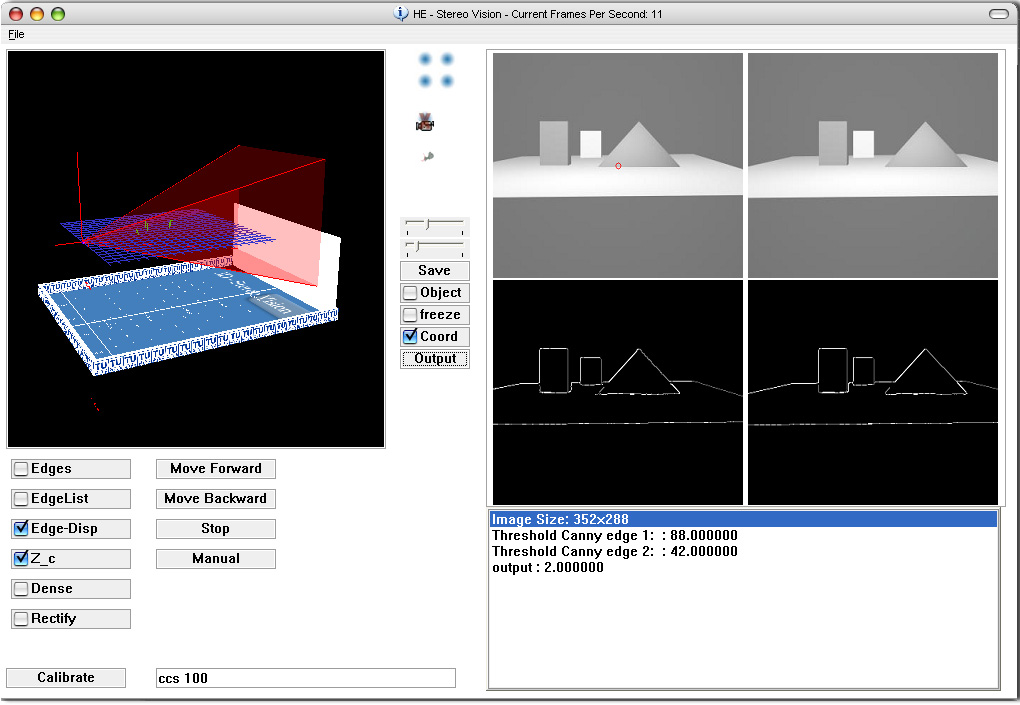
The input field, next to the calibrate button can be used to load image pairs into the program by entering their filename. If a image pair is found, it is loaded automatically. The prompt “ccs digit” moves the camera coordinate system, which has its origin in the OpenGL coordinate system, along the y axis. The value of digit represents the amount of the movement in cm.
The buttons on the left are used to control the program, e.g. show the edge list, rectify the images or calibrate the camera. The buttons next to them can be used to control the robot head. If Manual is pressed, the opto-couplers are deactivated, thus the head could turn in. The four circles in the middle, represents the images on the right side. If one is clicked, the image is displayed using the whole image area. The camera button can be used to switch between file or camera input. Freeze stops the calculation, and output can be used to change the output content.
Next: Robot Head
Up: Methods