Prototyp für das visuelle System des Tinyphoon
Ein sehr faszinierendes Themengebiet stellte für mich schon immer die Robotik dar.
Deshalb habe ich im Rahmen meiner Diplomarbeit einen Prototypen für das visuelle System des Tinyphoon Roboters entwickelt. Der damalige Projektleiter des Projekts, Dipl.-Ing. Dr. Gregor NOVAK, hat sich mittlerweile mit der Firma BlueTechnix erfolgreich selbstständig gemacht.
Die damalige Arbeit hat mir sehr viel Spaß gemacht und auch erste Blicke in die Tiefen der Robotic gewährt.
Der Tinyphoon
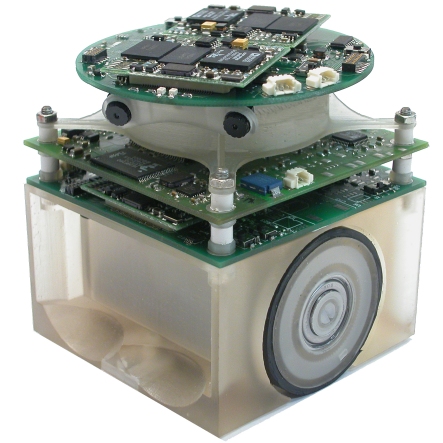
Rotator Head
Neben dem eigentlichen Softwareprojekt ist noch ein weiteres Projekt mit dem Namen “Rotator Head” entstanden.
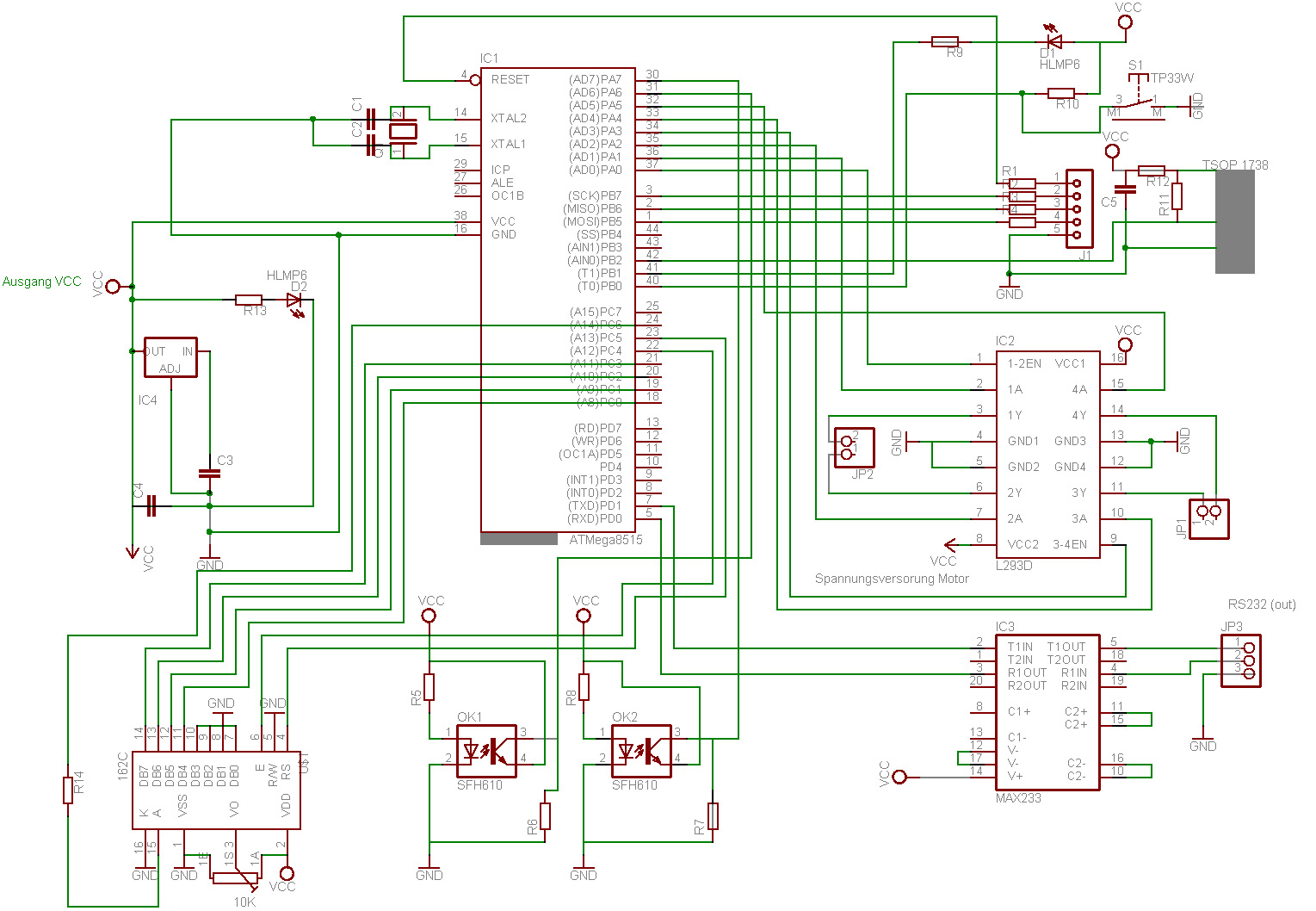
Der “Kopf” war dabei in Endausführung um zwei Achsen drehbar, verfügte über eine Displayanzeige, zwei IR-Sensoren, zwei Servo- sowie eine Schrittmotorsteuerung.
In das System integriert war zudem ein Stereokamerasystem, welches in der Lage war, in Echtzeit 3D Abbilder der Umgebung zu erstellen. Zur Disparitätsfindung wurden dabei nur die Kanten betrachtet (ein sogenannter Feature-Based Ansatz). Mit virtuellen Daten wurden dabei Raten von bis zu 60 FPS erreicht.
Als kleines Gimmick wurde zudem noch eine Gesichtserkennung integriert, wodurch der Roboter bei Anwesenheit von Menschen deren Bewegungen folgte, solange ein Gesicht erkennbar war.

Rotator Head
Hier finden Sie einen weiterführenden Artikel, der auch die Diplomarbeit selbst enthält.