Next: Epipolar Geometry
Up: Stereo Vision
Previous: Camera Calibration
Stereo Geometry
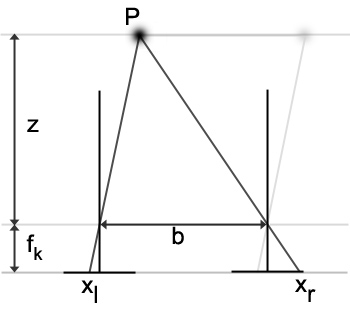
The geometry of a monocular camera system can easily be extended to a stereo camera system. Let us assume that two cameras with an
identical effective focal length ![]()
![]() are used (Figure 2.6). The distance between their centers of projection is the baseline
are used (Figure 2.6). The distance between their centers of projection is the baseline ![]()
![]() . A point
. A point ![]() in space is projected onto both sensor chips as
in space is projected onto both sensor chips as ![]() and
and ![]() . As one can see, the projected points are slightly translated in x-direction. If camera axes are parallel, there are only horizontal disparities to deal with. This lets us distinguish between two different stereo geometries.
. As one can see, the projected points are slightly translated in x-direction. If camera axes are parallel, there are only horizontal disparities to deal with. This lets us distinguish between two different stereo geometries.
- parallel camera-axes:
- only horizontal disparities, no
points without disparity - converge camera-axes:
- vertical, horizontal and points
without disparity can occur. The set of points without disparities
is called the theoretical horopter. Rectification is used to transform
the image so that only horizontal disparities appear. See Section 2.3.3 for more information.
The disparity ![]()
![]() and the depth or z-coordinate in a camera oriented coordinate system are indirectly proportionally related. This coherence is shown in Equation 2.14.
and the depth or z-coordinate in a camera oriented coordinate system are indirectly proportionally related. This coherence is shown in Equation 2.14.

Next: Epipolar Geometry
Up: Stereo Vision