Next: Correspondence Analysis
Up: Stereo Geometry
Previous: Occlusion
Constraints
Stereo matching is a difficult problem, especially when the images are noisy. But also with perfect images, ambiguities occur during the matching process, thus for one point in the one image there may be more points in the other image. In order to minimize false matches, matching constraints must be imposed. The following list shows some commonly used constraints.
- Similarity, Photometric constraint
- For an intensity-based approach (see Section 2.4.1 for more information), the matching pixels must have a similar intensity value. This constraint holds for an object with nearly lambertian surface and a parallel camera system. Also only an ambient light source should exist otherwise reflections and highlights would occur.
- Epipolar constraint
- Generally, the search for a corresponding point has to be made over the whole image. This is not true if the epipolar constraint is used. For a point in one image, the corresponding point in the other image must lie on the epipolar line. Thus the search is 1

 only.
only. - Uniqueness[MT79]
- A given pixel or feature in one image can only correspond to at most one pixel or feature in the other image. This constraint does not hold for transparent or occluded areas.
- Continuity[MT79]
- The disparity should vary smoothly almost everywhere
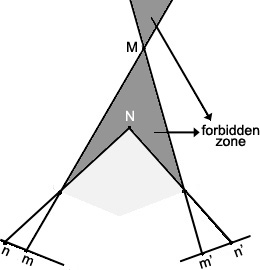
- Ordering[BB81]
- If

 and
and

 and if
and if  is on the right of
is on the right of  , then
, then  should also be on the right of
should also be on the right of  and vice versa. The ordering fails at regions known as forbidden zone (Figure 2.10).
and vice versa. The ordering fails at regions known as forbidden zone (Figure 2.10). - Disparity limit
- In most intensity-based approaches not the whole epipolar line is taken into account when searching for corresponding points, thus a limit for the disparity is set. For a point

 in the left image only points
in the left image only points
 in the right image are compared, where
in the right image are compared, where
![$ d in [1ldots maxdisp]$](https://www.anagram.at/app/uploads/2014/02/img127.png)
![$ d in [1ldots maxdisp]$](data:image/svg+xml,%3Csvg%20xmlns=%22http://www.w3.org/2000/svg%22%20viewBox=%220%200%20157%2037%22%3E%3C/svg%3E) .
.
Next: Correspondence Analysis
Up: Stereo Geometry