Prototyp für das visuelle System des Tinyphoon
Die Robotik stellte schon immer ein sehr faszinierendes Themengebiet dar.
Ein guter Grund sich als Diplomarbeit einen Prototypen für das visuelle System des Tinyphoon Roboters auszusuchen. Vielen Dank gilt hier nochmals Robert Sablatnik, vom Institut für Automatisierung an der TU-Wien.
Die Entwicklung des Tinyphoon selbst wurde von Dipl.-Ing. Dr. Gregor NOVAK geleitet. Mittlerweile hat er sich mit der Firma BlueTechnix erfolgreich selbstständig gemacht.
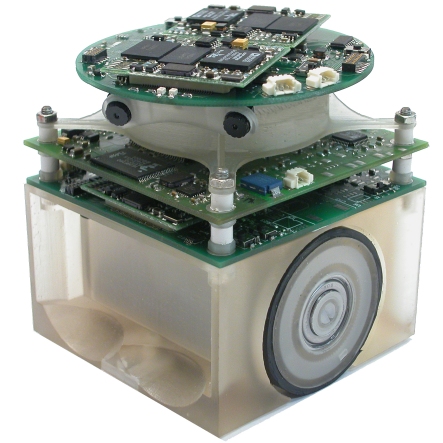
Der Prototyp des visuellen Systems
Neben dem eigentlichen Softwareprojekt ist noch ein weiteres Projekt entstanden, welches das Kamerasystem simulieren sollte.
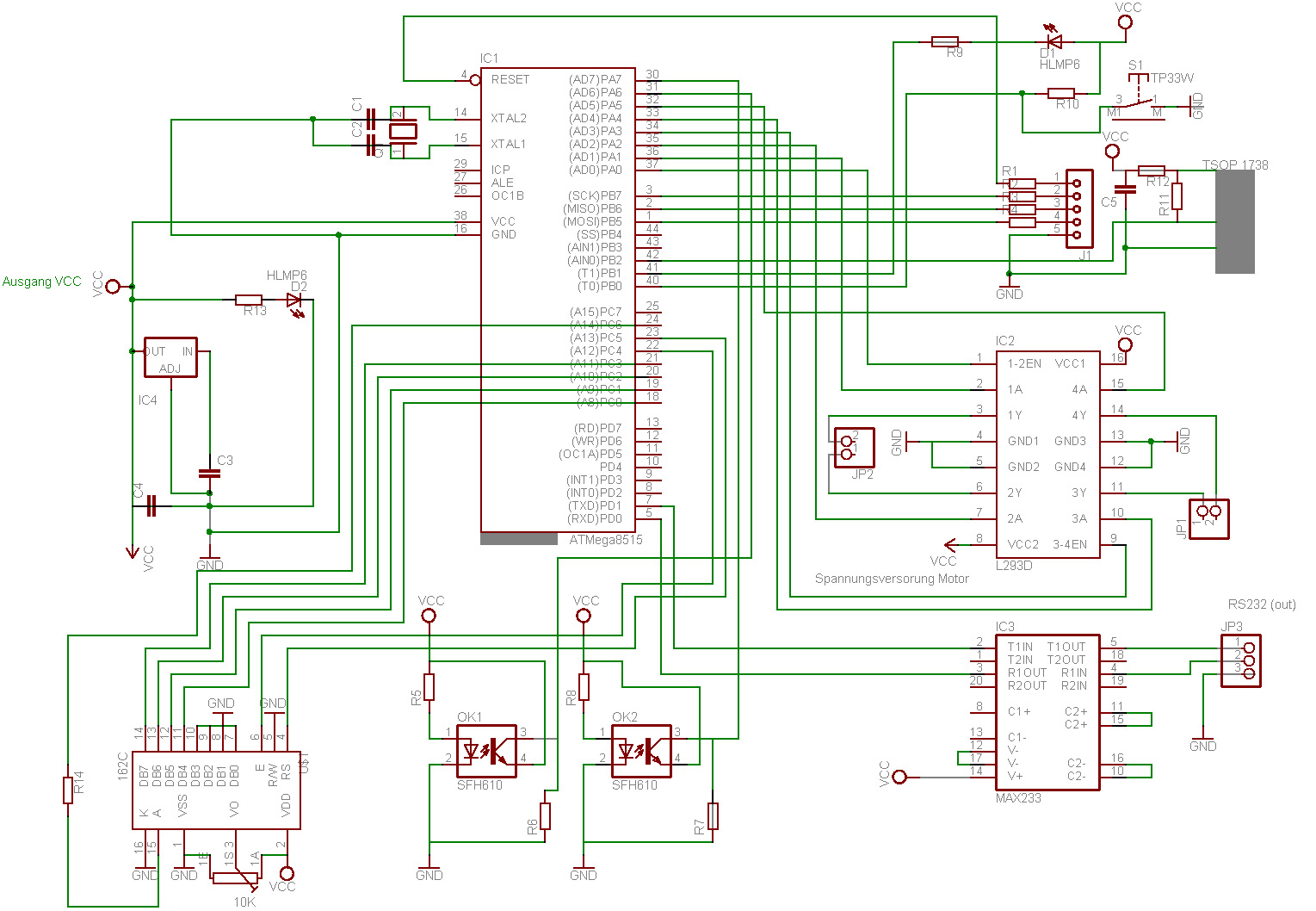
Der „Kopf“ war dabei in Endausführung um zwei Achsen drehbar, verfügte über eine Displayanzeige, zwei IR-Sensoren, zwei Servo- sowie eine Schrittmotorsteuerung.
In das System integriert war zudem ein Stereokamerasystem, welches in der Lage war, in Echtzeit 3D Abbilder der Umgebung zu erstellen. Zur Disparitätsfindung wurden dabei nur die Kanten betrachtet (ein sogenannter Feature-Based Ansatz), wodurch für die Berechnung Raten von bis zu 60 FPS erreicht wurden.
Als kleines Gimmick wurde zudem noch eine Gesichtserkennung integriert, welche dazu verwendet wurde Personen im Raum zu folgen.
Hier finden Sie einen weiterführenden Artikel, der auch die Diplomarbeit selbst enthält.